










A87 4 Channel Optocoupler Isolation Module High and Low Level Expansion
Categories :
Other ModulesSKU :
1941923100% original guarantee
Return within 30days
Worldwide Fast delivery
You may also like
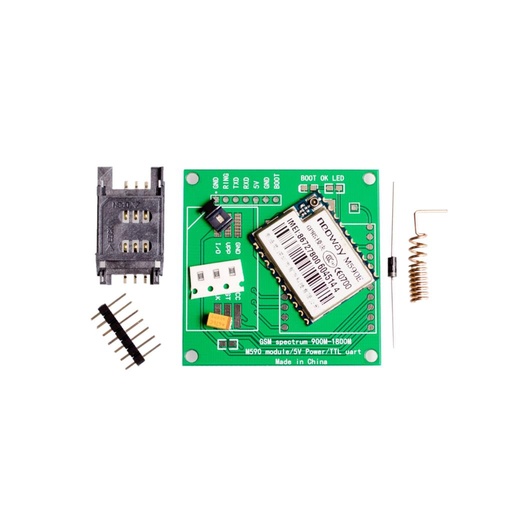
M590E GSM GPRS Module Diy Kits CPU MCU Test
$ 2.43 $ 2.43
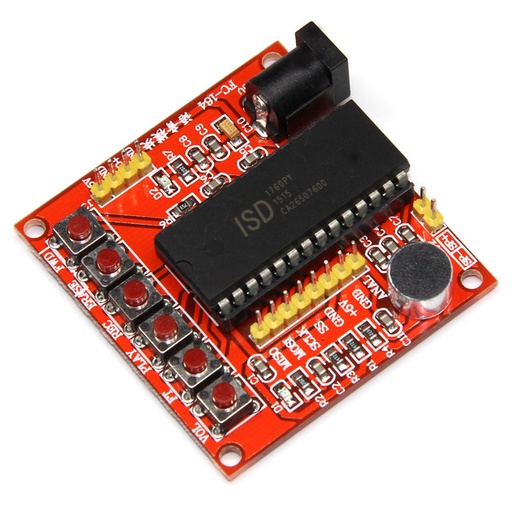

VS1053 MP3 Module Development Board On-Board Recording Function
$ 10.71 $ 10.71


A07 Frequency to Voltage Module 0-1KHz to 0-10V Voltage
$ 5.31 $ 5.31

Product description:
Function: Use the low level to control the high level. Such as the use of single-chip 3V or 5V voltage control 9V or 12v voltage.
HVCC should not exceed 24V. Output OUT1 / OUT2 / OUT3 / OUT4 output current equal to HVCC / 5.1K, absorption current 500ma.
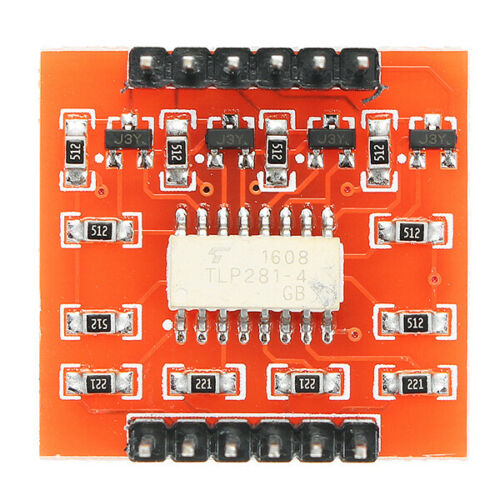
This module uses TLP281 chip (for Toshiba).
Schematic:
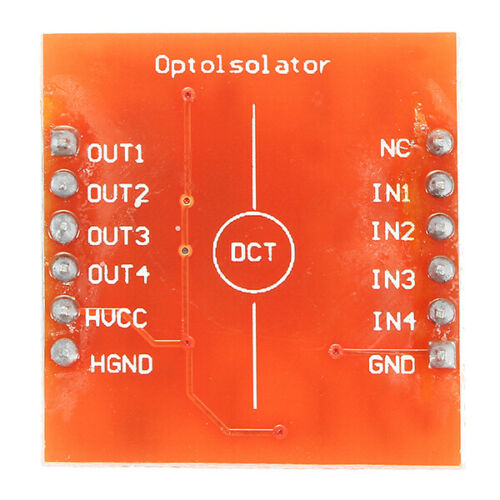
Input and output instructions:
Input: IN1 / IN2 / IN3 / IN4, then the microcontroller or Arduino IO port, GND and the Arduino development board connected to the GND.
IN1 / IN2 / IN3 / IN4 controls OUT1 / OUT2 / OUT3 / OUT4, respectively.
Output: OUT1 / OUT2 / OUT3 / OUT4
Output: HVCC: Connect the controlled high voltage positive, HGND connected to the controlled high voltage negative
Use: When IN1 is high, the corresponding OUT1 voltage is equal to HVCC, when IN1 is low, the OUT1 voltage is equal to HGND
Use examples:
Use examples:
The following example shows how to use the microcontroller's IO port to control the 24V motor rotation. Figure motor operating voltage of 24V,
red "+" that the motor power positive, black "-" that the motor power supply negative. When the microcontroller IO_0 output high, the motor rotate,
when the IO_0 port output low, the motor stops rotating.